Motor Drive Shield на L293D

Описание
В конструктор Arduino входит модуль управления двигателями, предназначенный для разработки моторизированных и робототехнических устройств. Он проверен на совместимость с конструкторами Arduino линий Mega, UNO, Diecimila и Duemilanove. Основа модуля управления двигателями две микросхемы L293D фирмы Texas Instruments – драйверы со встроенными обратными диодами, защищающими микросхему при работе на индуктивную нагрузку. Микросхема L293D обеспечивает питание двигателей током до 0,6 A при пиковом значении 1,2 А продолжительностью менее 0,1 с и напряжением 4,5…18 В. Микросхема имеет защиту от перегрева.
Резисторы, соединенные с общим проводом схемы, предотвращают включение двигателей при подаче питания на модуль. Управлять двигателями, рассчитанными на напряжение 3 В нельзя. Выбор скорости двигателя постоянного тока происходит с дискретностью 8 бит, что соответствует разрешающей способности около 0,5 %. Для управления надо использовать специальную библиотеку подпрограмм. Сигналы управления двигателями постоянного тока и шаговыми двигателями поступают на микросхему 74HC595 сдвиговый регистр. Модуль Motor Drive Shield L293D способен управлять шаговыми двигателями однополярного или двухполярного типа с одинарной или двойной обмоткой, а также микрошаговыми двигателями. Подключение проводов двигателей производится с помощью винтовых контактов на плате модуля. Модуль содержит кнопку сброс.
Параметры
- Напряжение питания модуля и сервоприводов 5 В
- Какие двигатели и в каком сочетании можно использовать:
- 2 серводвигателя, рассчитанные на 5 В и 4 двигателя постоянного тока
- или
- 2 шаговых двигателя
- или
- 1 шаговый двигатель и 2 двигателя постоянного тока.
- Размеры платы: 69 Х 53 Х 14,3 мм
Питание
В принципиальной электрической схеме модуля существуют две отдельные линии питающего напряжения: слабых токов и силовая. Питание цифровых цепей модуля малым током и напряжением 5 В происходит от контроллера Arduino. Эта же линия питает серводвигатели. Для силовой линии модуль Motor Drive Shield L293D содержит 2-контактный винтовой соединитель питания двигателей постоянного тока и шаговых подписанный “EXT_PWR”. Имеется светодиод, его свечение говорит о включении силового питания. Серводвигатели не используют питание двигателей постоянного тока.
Управление силовым питанием производится перемычкой “PWR”. Схема совместной работы модуля управления моторами и контроллера Arduino такова, что при наличии внешнего питания установка перемычки усиливает мощность питания в линии 5 В. Это нужно для серводвигателей. Если внешнего питания нет или перемычка снята, то серводвигатели будут питаться от источника 5 В контроллера. При управлении моторами постоянного тока и шаговыми установка перемычки подключает внешнее питание напряжением 4,5…18 В к силовым цепям питания двигателей. При этом происходит увеличение запаса мощности для питания цифровых цепей модуля и контроллера Arduino.
Подключение двигателей постоянного тока
Расположенные на плате модуля две группы из пяти винтовых контактов предназначены для подключения двух двигателей постоянного тока к каждой. Они подключаются к крайним парам контактов, имеющим маркировку на плате “M1”, “M2”, “M3” и “M4”. Перемычка “PWR” должна быть установлена. К паре винтовых контактов “EXT_PWR” подключается внешний источник питания напряжением 4,5…18 В.
Оглавление
НАЗНАЧЕНИЕ
ВНЕШНИЙ ВИД
СХЕМА ЭЛЕКТРИЧЕСКАЯ
ОСОБЕННОСТИ ПОДКЛЮЧЕНИЯ Motor Shield L293D К Arduino UNO
ПОДКЛЮЧЕНИЕ ПИТАНИЯ
СХЕМЫ ПОДКЛЮЧЕНИЯ ДВИГАТЕЛЕЙ К Motor Shield L293D
- Подключение DC двигателей
- Подключение шаговых двигателей двигателей к
- Подключение серво двигателей
БИБЛИОТЕКИ
- AFMotor.h
НАЧАЛО РАБОТЫ
СКЕТЧИ
- L293D_Test_DC_Motors_UNO.ino
НАЗНАЧЕНИЕ
Motor Shield L293D предназначен для управления различными типами двигателей -- постоянного тока (до 4-х шт.) , сервомоторов (до 2-х шт.) и шаговых двигателей (до 2-х шт.) совместно с Arduino.
ВНЕШНИЙ ВИД

СХЕМА ЭЛЕКТРИЧЕСКАЯ

Рисунок 1
ОСОБЕННОСТИ ПОДКЛЮЧЕНИЯ Motor Shield L293D К Arduino UNO
Как видно из Рисунка 1 режимы управление двигателями постоянного тока и шаговыми двигателями осуществляется через м/сх 74HCT595N (Рисунок 2). Это регистр последовательного сдвига с защелкой. В библиотеке AFMotor.h определены pin для Motor Shield L293D по которым осуществляется установка режимов управление моторами :
// Arduino pin names for interface to 74HCT595 latch
#define MOTORLATCH 12 = DIR_LATCH // pin 12 Arduino
#define MOTORCLK 4 = DIR_CLK // pin 4 Arduino
#define MOTORENABLE 7 = DIR_EN // pin 7 Arduino
#define MOTORDATA 8 = DIR_SER // pin 8 Arduino
За изменение скорости вращения двигателей отвечаю цепи PWM0A, PWM0B, PWM1A, PWM1B, PWM2A, и PWM2B микросхем драйверов двигателей L293D (Рисунок 3) .

Рисунок 2 Рисунок 3
Соответствие pin - Motor Shield L293D и pin - Arduino Uno приведены в Таблице 1, а назначение управляющих битов регистра 74HCT595N для моторов 1- 4 в Таблице 2

Верхние разъемы Нижние разъемы
Таблица 1

Таблица 2
Из Таблицы 2 видно, чтобы заставить Мотор 1 работать на max скорости нужно в регистр передать byte у которого bit 2 = 1 и bit 3 = 0, а чтобы поменять вращение на противоположное – bit 2 = 0 и bit 3 = 1.
!!Еще одна важная особенность!!!
Питание сервомоторов осуществляется от платы Arduino 5V. Если сервомоторы потребляют больший ток чем может выдать источник питания Arduino , то всё устройство начинает «глючить».
Это может случиться даже с небольшими серводвигателями, если их где-то заклинит. Тогда ток потребления может возрасти до 0,8-1А. Поэтому питать серводатгатели лучше от дополнительного источника питания.
ПОДКЛЮЧЕНИЕ ПИТАНИЯ
Питание моторов подключенных к Motor Shield L293D может осуществляется не сколькими способами:
1. От одного источника питания. В этом случае питание подается на разъем Arduino 6-12В и с выхода линейного стабилизатора происходит пмиание цифровых схем Arduino и сервомотороы. Далее питание 6-12В через контакт Vin и установленный джампер, подается на Motor Shield L293D для питания остальных типов моторовмоторов.

Рисунок 4
2. От двух источников питания. Для этого необходимо снять джампер источника питания (Рисунок 4). В этом случае источник питания подключенный к разъем у Arduino 6-12В обеспечивает ее работу, цифровых схем Motor Shield L293D и питание серво двигателей. А второй источник питания 4.5-25В - питание двигателей постоянного тока и шаговых двигателей.
СХЕМЫ ПОДКЛЮЧЕНИЯ ДВИГАТЕЛЕЙ К Motor Shield L293D
Подключение DC двигателей
Motor Shield L293D позволяет одновременно подключить до 4-х двигателей постоянного тока

Рисунок 5
Подключение шаговых двигателей двигателей к Motor Shield L293D
Motor Shield L293D позволяет одновременно подключить до 2-х шаговых двигателей

Подключение серво двигателей.
Motor Shield L293D позволяет одновременно подключить до 2-х серво двигателей

Рисунок 7
НАЧАЛО РАБОТЫ
- Установить Motor Shield L293D в плату Arduino UNO.
- Подключить к Motor Shield L293D DC моторы Motor#1 и Motor#2 как на Рисунке 5
- Подключить питание как описано в разделе «ПОДКЛЮЧЕНИЕ ПИТАНИЯ»
- Залить скетч L293D_Test_DC_Motors_UNO.ino
- Запустить по очереди тестовые программы
Car_MAX_Forward();
Car_MAX_Backward();
Car_PWM_Speed_Forvard(100);
Car_PWM_Speed_Backward(100);
Car_Acceleration();
Характеристики
Документация
Datasheet отсутствует. Загрузите Datasheet и получите скидку 5% на всю корзину

Самовывоз | Курьер | Почта | EMS
Своевременный возврат товара
Товар из этой же категории:

12-канальный драйвер для сервопривода

12-канальный драйвер для сервопривода интерфейс-PCA9685
Дравер шаговых двигателей ULN2003 (голубой)

Драйвер дигателя TB6600 DC12-45V

драйвер для двигателей постоянного тока L293D 2X motor shield

Драйвер двигателей 2 канала L298N

Драйвер двигателей 4 канала L293D
Драйвер двигателей HG7881 4 канала

Драйвер двигателей L293D
Драйвер двигателей L298N (красный)
Драйвер двигателей L298N Dual H Bridge DC Stepper
Драйвер двигателей TB6612FNG Ultra L298N
Драйвер двигателя HG7881
Драйвер двигателя L298N

Драйвер двигателя L298N c разъемом для 28BYJ48

Драйвер двигателя L9110

Драйвер двигателя ULN2003a
Драйвер шагового двигателя EasyDriver A3967

Драйвер шагового двигателя TB6560 CNC

Драйвер шаговых двигателей (3 оси) TB6560 для mach3 3.5 + USB кабель
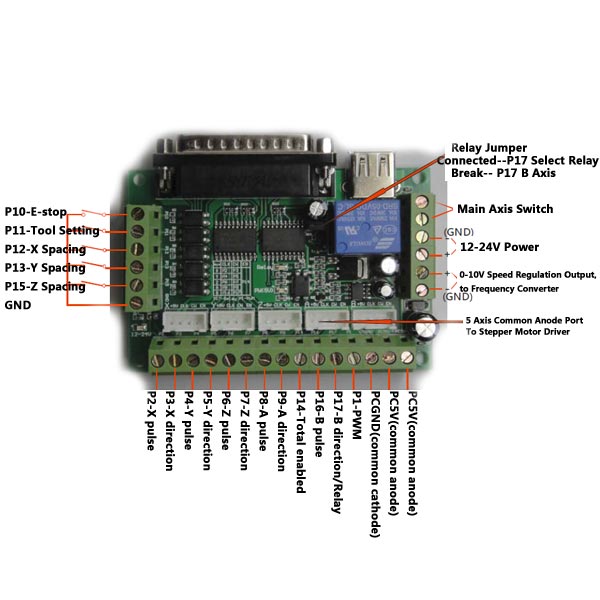
Драйвер шаговых двигателей (5 осей) для mach3
Драйвер шаговых двигателей BTS7960
Драйвер шаговых двигателей двойной H мост L298N (зеленый)

Драйвер шаговых двигателей L298N двойной H мост (голубой)

Драйвер шаговых двигателей L9110 L9110S
Драйвер шаговых двигателей L9110 L9110S (нормальное качество)

Драйвер шаговых двигателей TB6560 3A

Драйвер шаговых двигателей TB6612FNG

Драйвер шаговых двигателей ULN2003 (зеленый)

Драйвер шаговых двигателей VNH2SP30 (30 ампер)

Драйвер шаговых двигателей VNH2SP30 (китайский чип)
L298N 2X MOTOR SHIELD - мощный драйвер для двигателей постоянного тока

Модуль драйвера IRF520 MOSFET
Модуль драйвера сервопривода 12-bit PWM I2C interface PCA9685

Модуль двигателей 12/24V 7A 160W dual

Модуль управления D4184 Mosfet

Модуль управления Mosfet FR120N
Модуль управления MOSFET LR7843
Мотор-драйвер шагового двигателя A4988

Мотор-драйвер шагового двигателя DRV8825
Motor Drive Shield на L293D
Плата расширения для ESP8266 WiFi NodeMcu драйвер двигателей L293D

Плата расширения драйвера шаговых двигателей L298P
Светодиодная панель 5mm 8*8 RGB + драйвер

Светодиодный драйвер 4-38В 5А




